- Information
- AI Chat
Introduction TO Automatic Control
Process Control Systems 3B
Durban University of Technology


Preview text
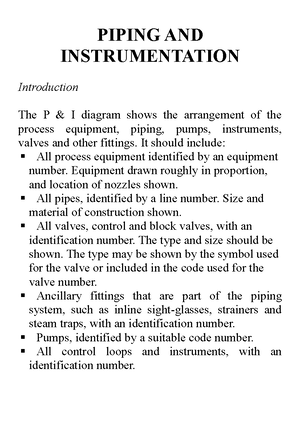
INTRODUCTION TO AUTOMATIC CONTROL
Several techniques used in solving engineering problems are based on the replacement of functions of a real variable (usually time or distance) by certain frequency-dependent representations, or by functions of a complex variable dependent upon frequency. A typical example is the use of Fourier series to solve certain electrical problems. One such problem consists of finding the current in some part of a linear electrical network in which the input voltage is a periodic or repeating waveform. The periodic voltage may be replaced by its Fourier series representation, and the current produced by each term of the series can then be determined. The total current is the sum of the individual currents (superposition). This technique often results in a substantial savings in computational effort.
Two very important transformation techniques for linear control system analysis are presented in this chapter: the Laplace transform and the z-transform. The Laplace transform relates time functions to frequency-dependent functions of a complex variable. The z-transform relates time sequences to a different, but related, type of frequency-dependent function. Applications of these mathematical transformations to solving linear constant-coefficient differential and difference equations are also discussed here. Together these methods provide the basis for the analysis and design techniques developed.
Differentiation and integration techniques (which should be known at this stage) are used to find the Laplace and inverse Laplace transform of a function. It is also important to have a thorough grasp of partial integration (integration of the product of two variables).
Partial integration:
f = f(x) (x)dx
where
1 df(x) [derivative of f(x)] dx
Example 1
J x In(x)dx = J In(x).xdx
= In(x). dx 2 In(x). x x 2 4
Example 2
e x .xdx x. x—Je x .ldx
Example 3
x. cos xdx x. sin x sin x. Idx
= cos x = COST —
3 THE LAPLACE TRANSFORMS
Ref. RAVEN, Chapter 5 page 162
The Laplace transform technique is a very convenient method for assisting in the solution of differential equations. It is helpful at first to consider this technique as being somewhat analogous to the use of logarithms to simplify such mathematical operations as multiplication, division and raising numbers to powers. When carrying out such operations, the original numbers of the problems are transformed into the logarithmic domain by the use of log tables, the solution in the logarithmic domain is obtained by a simpler process (addition instead of multiplication, multiplication instead of raising to a power, etc.), and finally the result is transformed back into the normal number domain by use of the anti-log tables. Similarly, when solving a differential equation using Laplace transforms, the equation is first transformed into
If the Laplace transform of fi(t) is Fl (s) and A is a constant, then the Laplace transform of A(t) is A(s)
If the Laplace transform off(t) is F(s), the transform of the time derivative f(t) is = sF(s) - 0+) with f(0+) the initial value of f(t).
The Laplace transform of the pth-order derivative of f(t), is given by: = S P F(s)
where represents the (p-l) the derivative off(t) with respect to time, at t
The Laplace transform of the time integral of f(t), is given by:
(3) s
The Laplace transform of the pth-order integration of f(t), is given by
The Laplace transform of f(t), delayed in time by T, is given by:
(3)
If F(s) is the Laplace transform of f(t) and lims-> sF(s) exists, then the initial value of f(t) is given by the initial-value theorem:
limt f (t) = lims+@ sF(s)
If F(s) is the Laplace transform of f(t) and if sF(s) is analytic on the imaginary axis and in the right half-plane, then the final value of f(t) is given by the final-value theorem:
1
1 1 1
s
f(t) = lims sF(s)
NOTE: See Laplace transform properties- RAVEN page 173, Table 5.
The inverse Laplace transform is required to obtain the time response and is given by:
f C+JOo—J0 (3) 27tj
F(s) is usually of the form
When this is not in a form which can be found in the available tables, it is necessary to find the partial fraction expansion of F(s) in order to determine its inverse Laplace transform.
Using partial fraction expression, F(s) can be written in the form F(s) = Fl(s) + F2(s) + F3(s) + ....+ Fp-l(s) + Fp(s) where p is the highest order of the variable in the numerator. An example (example 5) is used to describe this technique.
The inverse Laplace transform of F(s) is f(t) IF(s)] E l E l [F2(s)] + ......+ E l [Fp-l(s)] + E l [Fp(s)] (3)
The process of using the Laplace transform technique in this way to solve the differential equation for a given system input function is illustrated in the next paragraph. Often however in control system analysis, information in the s-plane suffices,
2 where s
s from equation (3. l)
(partial integration)
1
5
Find the inverse Laplace transform of the following function:
for s not equal to 1, -2 or -3.
Thus
5s + 19 =KI (s +2 +3) + K2(s -
Fors 1
5 + 19-
- 10 + 19 =
For s— 3
-15 + 19 ̄
Thus:
2 3 1
The inverse Laplace transform of each term of F(s) can be found in Table B. 1 (Appendix B)
6
Let
therefore (1) let
then A may be found by using the property of an identity, viz. , the coefficients of like terms on the two sides of the identity are equal. Comparing coefficients of x in (1) above, we get:
therefore
3. Denominator of higher degree than the second and resolvable into factors.
(a) When the denominator is entirely resolvable into different factors.
3
7
3 —4x —x 2 3 —4x x Let(resolve quadratic equation into factors) x(x 2 —4x +3) ̄ —
then partial fractions are 3-4x-x 2 A B c x(x — 3) x x —1 x —3 solve for A, B and C similar to example 5 above.
8
Let
The procedure to solve the above is the same as example 6, above.
4. Denominator contains a quadratic factor which cannot itself be factorised.
Example 9
Let
Bx+C
then A(x 2 + l) + (BX + C (1)
Let
then -2 = A(2) + O
therefore Substituting this value of A into (l), we get: — -(x 2 + l) + (BX + + l) or
Equating coefficients of x
therefore
Equating coefficients of x
therefore
Introduction TO Automatic Control
Course: Process Control Systems 3B
University: Durban University of Technology




- Discover more from: