- Information
- AI Chat
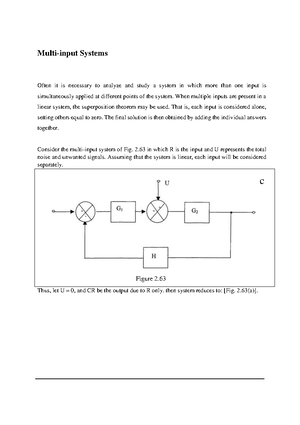
Steady-state and transient responses
Process Control Systems 3B
Durban University of Technology


Preview text
Steady-state and transient responses
Transient response + Steady-state response = Total response
Transient response definition:
The transient response is that part of the total response which decays with time and eventually vanishes as time approaches infinity.
The characteristics of the transient response of a system, are usually defined on the basis of a
step input.
Steady-state response definition:
The steady-state response is that part of the total response which persists indefinitely as time
approaches infinity.
Consider the function: f(t) = 2e 2t + t - 3;
The term, 2e 2t , decays with time but the term t - 3, persists indefinitely. Unfortunately, there is always an error involved in the steady-state performance and ways of minimising this steady-state error, is discussed in paragraph 3.4.
3.4 Singularity functions: steps, ramps, and impulses
In the study of control systems and the equations which describe them, a particular family of functions called singularity functions is used extensively. Each member of this family is related to the others by one or more integrations or differentiations. the three most widely used singularity functions are the unit step, the unit impulse, and the unit ramp.
A unit step function I(t - to) is defined by
1 for t > to and
- to ) for t ' to (3) The unit step function is illustrated in Fig. 3 (a).
Unit Step
t = to t
(a)
1
Unit Ramp
t = to 1 t
(b)
Figure 3.
— At)
1
(c)
A unit ramp function is the integral of a unit step ftnction
%)=t-% for t > to (x is called the time constant)
The unit ramp ftnction is illustrated in Fig. 3(b)
f f(t)ö(t — = f(%)
The unit impulse response of a system is the output y(t) of the system when the input u(t) = ö(t) and all initial conditions are zero.
Example 11
If the input-output relationship of a linear system is given by
then the unit impulse response
% (t) = w(t — = f % w(t — = w(t) (3)
since w(t - ) = 0 for t, > t, ö (t) = 0 for t < 0, and the screening property of the unit impulse has been used to evaluate the integral.
The unit step response is the output y(t) when the input u(t) ̄ I(t) and all initial conditions are zero.
The unit ramp response is the output y(t) when the input u(t) = t for t > 0, and u(t) = O for t 0, and all initial conditions are zero.
3.4 Second order system
In the study of control systems, linear constant-coefficient second order differential equations of the form:
d2y + 2Con—+ dy = o.)ty dt2 dt are important because higher-order systems can often be approximated by second-order systems. The constant is called the damping ratio, and the constant o n is called the undamped natural frequency of the system. The forced response of this equation for inputs u belonging to the class of singularity functions is of particular interest. That is the forced response to a unit
impulse, unit step, or unit ramp is the same as the unit impulse response, unit step response, or unit ramp response of a system represented by this equation.
Assuming that 0 1, the characteristic equation for Equation (3) is:
D 2 +2ConD+w 2 n -jon 1 —G 2 ID+Ca.)n + jon
Hence the roots are:
DI — —Con + jon 1 —C 2 = 0' + .j0d = ̄ .j O d
where u = Con is called the damping coefficient, and o d = on I —C 2 is called the damped 1 natural frequency, u is the inverse of the time constant of the system, that is =
The weighting function of Equation (3) is w(t) sinoöt.
The unit step response is given by y(t)l = w(t — x)otdt
= 1— one sin(0dt + where = tan
System order refers to the highest power of s in the denominator of the closed-loop transfer ftmction. Examples of the first and second order systems, are given below.
First-order system:
S
d
u —jß and u +jß are the complex conjugate poles.
Second order systems characterise the dynamics of many control systems. Most control system designs are based on second-order system analysis even if the system is of higher order, in which case the system is approximated by a second order system.
The closed-loop second-order transfer function as shown in equation (l), has real poles* , viz. b and c
The closed-loop second-order transfer function as shown in equation (2), has complex poles* , viz. u —jß and u +jß.
3.4 Damping ratio
The damping ratio, , is defined as the ratio of the actual amount of damping to the critical amount
of damping.
Critical damping is defined as the amount of damping necessary to reduce the overshoot to zero.
The response is critically damped when 1 as shown in Fig. 3, the response of a critically damped second-order system. A is the steady-state value of the response.
A is the steady-state value (rad)
Figure 3.
Input
*A pole is that value of s which will make the denominator of the transfer ftlnction zero. A zero is that value of s which will make the numerator of the transfer function zero. The response is overdamped when C > 1, as shown in Fig. 3, the response of an overdamped second-order system.
f(t)
t (rad)
Figure
3.
A is the steady-state value Input
on
The response is underdamped when < 1 as shown in Fig. 3, the response of an underdamped second-order system.
f(t)
of
A +37%
90 % A
63 % A
(sec)
Figure 3.
A A is the steady-state value
o td
3.4 Delay time
The time required for the response of a second-order system to a unit-step input (see Fig. A. 1 in Appendix A), to reach 50 % of its final value (steady-state value), is referred to as the delay time (to. See Fig. 3.
304. Rise time
%
The rise time (tr) is the time required for the response of a second-order system to a unit-step input, to rise from 10 % to 90 % of its final value (steady-state value). See Fig. 3.
3.4 Settling time
The settling time (ts ) is the time required for the response of a second-order system to a unitstep input, to damp out all transients theoretically, this is infinity for a second-order system. In practice, it is the time to reach and remain within 98 % of its final value (steady-state value). See Fig. 3.
3.4 Time constant and damping coefficient
The time taken for the envelope of the transient response to decay to within 37 % of the steady- state value, is the time constant (t). The damping coefficient (u) is the inverse of the time constant (t).
1
3.4 Zero-input response
The zero-input response is caused by internal conditions (or initial conditions) and not by the external input. The zero-input component consists of the sum of natural modes:
C 1 e ßlt+ C2eß2t +. ...+ Cn eßnt (1)
3.4 Zero-state response
The zero-state response is caused by external inputs. The zero-state response also has natural- mode terms:
b I eß l t + b2eß2t + ....+ b eßnt (2)
Steady-state and transient responses
Course: Process Control Systems 3B
University: Durban University of Technology



- Discover more from: