
- Information
- AI Chat
Timing analysis
Software Engineering (CSPC 111)
STI West Negros University

Preview text
Timing analysis
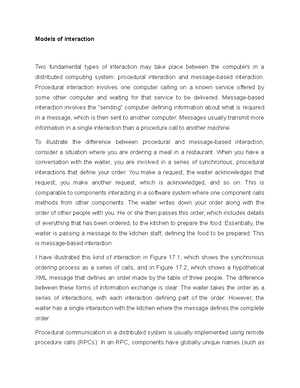
As I discussed in the introduction to this chapter, the correctness of a real-time system depends not just on the correctness of its outputs but also on the time at which these outputs were produced. Therefore, timing analysis is an important activity in the embedded, real-time software development process. In such an analysis, you calculate how often each process in the system must be executed to ensure that all inputs are processed and all system responses are produced in a timely way. The results of the timing analysis are used to decide how frequently each process should execute and how these processes should be scheduled by the real-time operating system.
Timing analysis for real-time systems is particularly difficult when the system has to deal with a mixture of periodic and aperiodic stimuli and responses. Because aperiodic stimuli are unpredictable, you have to make assumptions about the probability of these stimuli occurring and therefore requiring service at any particular time. These assumptions may be incorrect, and system performance after delivery may not be adequate. Cooling’s book (Cooling 2003) discusses techniques for real-time system performance analysis that takes aperiodic events into account.
As computers have become faster, it has become possible in many systems to design using only periodic stimuli. When processors were slow, aperiodic stimuli had to be used to ensure that critical events were processed before their deadline, as delays in processing usually involved some loss to the system. For example, the failure of a power supply in an embedded system may mean that the system has to shut down attached equipment in a controlled way, within a very short time (say 50 milliseconds). This could be implemented as a “power fail” interrupt. However, it can also be implemented using a periodic process that runs frequently and checks the power. As long as the time between process invocations is short, there is still time to perform a controlled shutdown of the system before the lack of power causes damage. For this reason, I only discuss timing issues for periodic processes.
When you are analyzing the timing requirements of embedded real-time systems and designing systems to meet these requirements, you have to consider three key factors:
Deadlines The times by which stimuli must be processed and some response produced by the system. If the system does not meet a deadline, then, if it is a hard real-time system, this is a system failure; in a soft real-time system, it results in degraded system service.
Frequency The number of times per second that a process must execute so that you are confident that it can always meet its deadlines.
Execution time The time required to process a stimulus and produce a response.
Execution time is not always the same because of the conditional execution of code, delays waiting for other processes, and so on. Therefore, you may have to consider both the average execution time of a process and the worst-case execution time for that process. The worst-case execution time is the maximum time that the process takes to execute. In a hard real-time system, you may have to make assumptions based on the worst-case execution time to ensure that deadlines are not missed. In soft real-time systems, you can base your calculations on the average execution time.
To continue the example of a power supply failure, let’s calculate the worst-case execution time for a process that switches equipment power from mains power to a battery backup. Figure 21 presents a timeline showing the events in the system:
- Assume that, after a mains power failure event, it takes 50 milliseconds (ms) for the supplied voltage to drop to a level where the equipment may be damaged.
The audible alarm should be switched on within half a second of an alarm being raised by a sensor.
Communications
The call to the police should be started within 2 seconds of an alarm being raised by a sensor.
Door alarm
Each door alarm should be polled twice per second.
Lights switch
The lights should be switched on within half a second of an alarm being raised by a sensor.
Movement detector
Each movement detector should be polled twice per second.
Power failure
The switch to backup power must be completed within a deadline of 50 ms.
Voice synthesizer
A synthesized message should be available within 2 seconds of an alarm being raised by a sensor.
Window alarm
Each window alarm should be polled twice per second.
Timing analysis
Course: Software Engineering (CSPC 111)
University: STI West Negros University



